ROS机器人入门-ROS安装
ROS简介
ROS(Robot Operating System)全称机器人操作系统,是适用于机器人的开源元操作系统,ROS系统继承了大量的工具、库、协议,提供类似OS的功能,简化对机器人的控制。此外,ROS还提供了用于在多台计算机上获取、构建、编写和运行代码的工具和库,ROS在某些方面类似于“机器人框架”。
ROS的设计者将ROS表述为“ROS= Plumbing + Tools + Capabilities + Ecosystem”,即ROS是通讯机制、工具、机器人技能以及机器人生态的集合体。
ROS安装
ROS在Ubuntu的支持性较好,一般都是安装在Ubuntu系统,对于初学者来说,可以通过在虚拟机上安装Ubuntu的方式安装。
虚拟机、Ubuntu安装
一般常用的虚拟机有VirtualBox以及VMware,网络上也有大量关于虚拟机、以及虚拟机系统安装的教程。由于我电脑上之前安装了VMware以及Ubuntu20.04系统,所以接下来将会以当前系统版本进行ROS的安装。
安装ROS
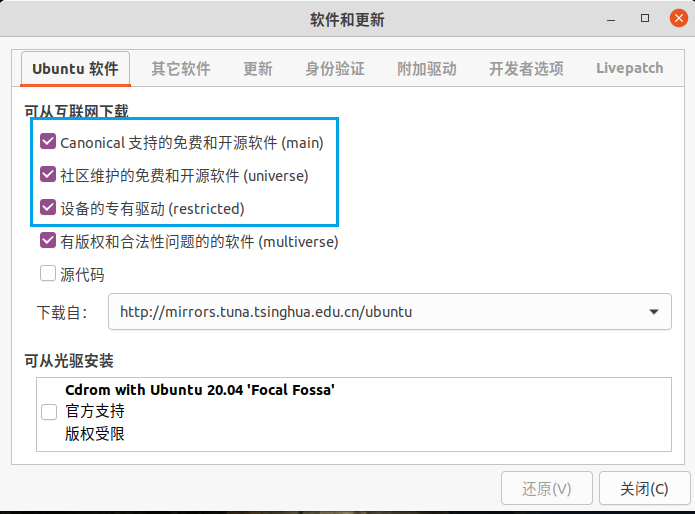
1、配置软件和更新
在Ubuntu的软件和更新中修改配置,选中main、universe和restricted。
2、设置安装源
- 官方源
1 | sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' |
- 清华源
1 | sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' |
3、设置Key
1 | sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 |
4、安装ROS
1、更新apt
1 | sudo apt update |
2、安装官方推荐的Desktop-Full类型ROS
1 | sudo apt install ros-noetic-desktop-full |
安装过程中可能会报错,尝试多次安装直到全部安装完成。安装过程可能时间较长。
3、配置环境变量
1 | echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc |
4、安装构建依赖
1 | sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential |
5、初始化rosdep
1 | sudo rosdep init |
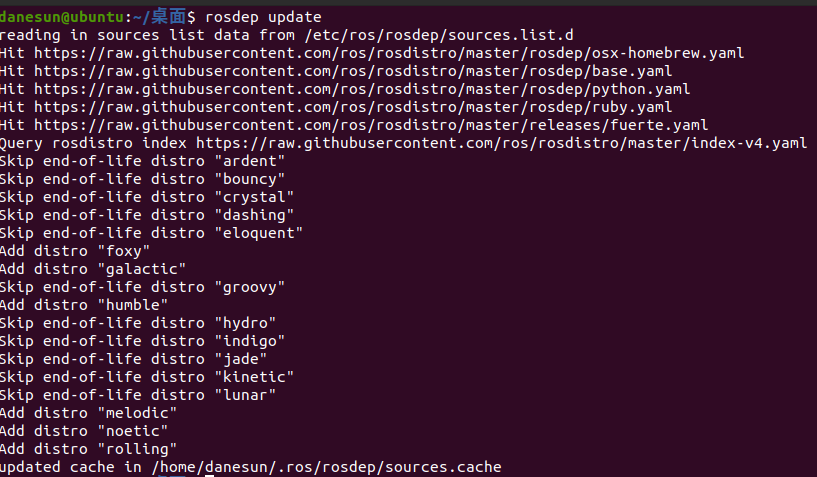
rosdep update执行可能会报错。
rosdep updatetime out 报错解决
2
3
sudo pip3 install 6-rosdep
sudo 6-rosdep原理:自动将rosdep更新源替换成国内gitee仓库,从而解决国外仓库访问超时的问题。
我的解决方法是挂了一个香港代理,但该方法不一定能够完全解决更新报错问题。安装成功显示如下界面。
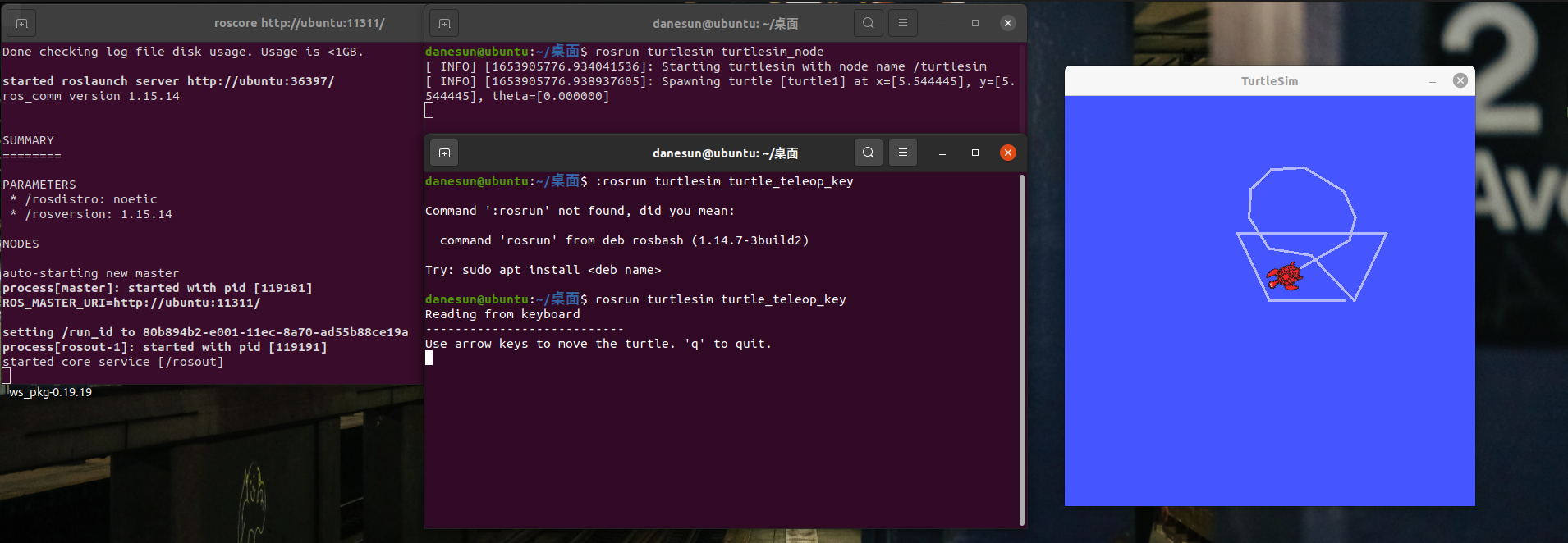
测试ROS
打开三个终端
终端1运行:roscore
终端2运行:rosrun turtlesim turtlesim_node打开图形化界面
终端3运行:rosrun turtlesim turtle_teleop_key通过键盘方向键控制乌龟运动